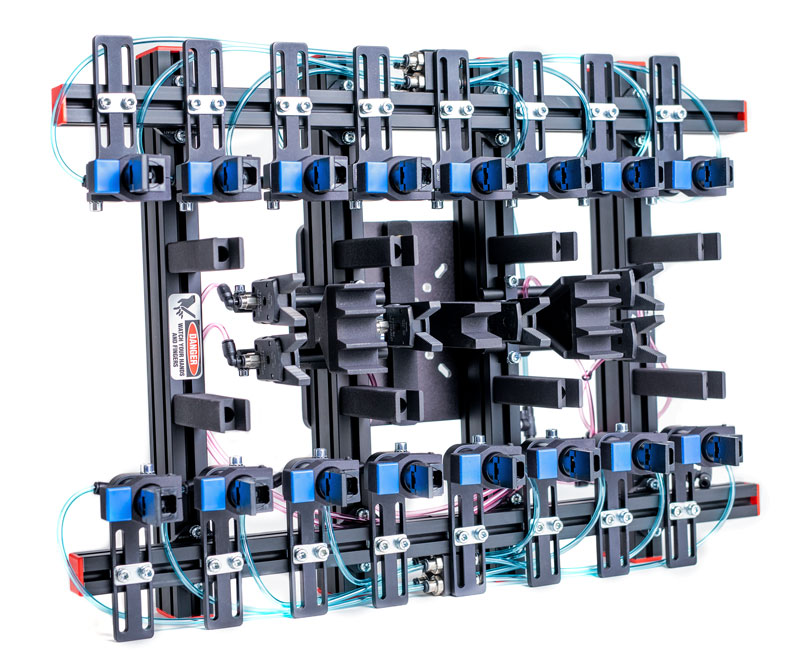
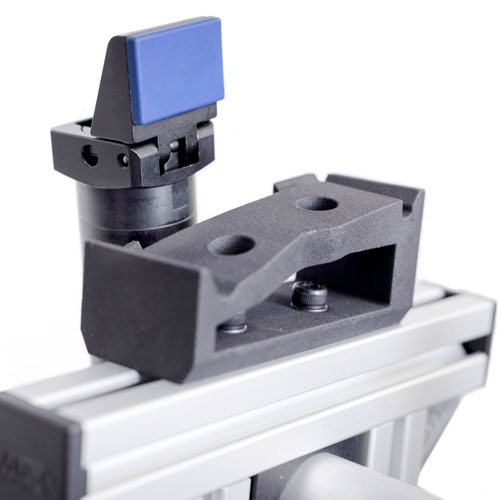
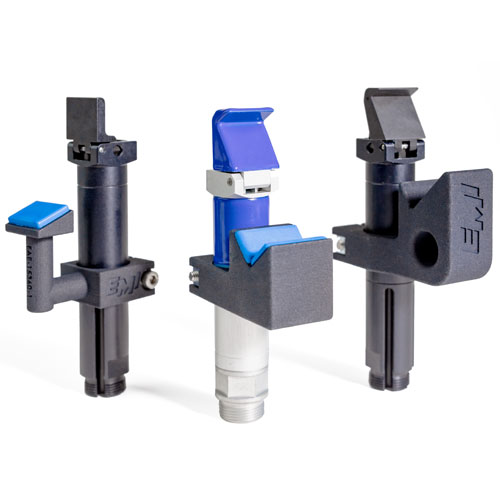
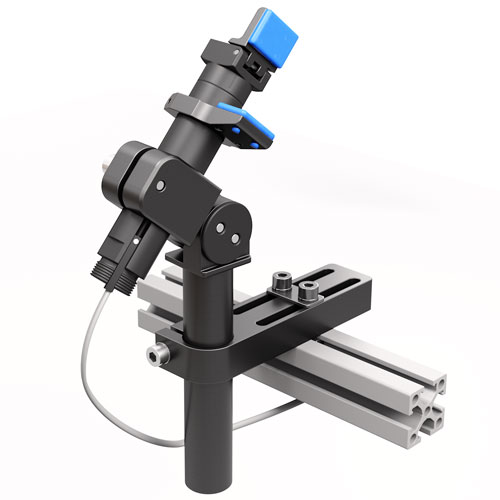
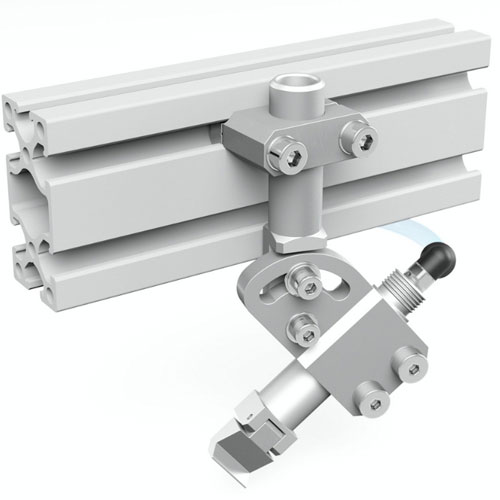
EOAT gripper fingers are ideal for gripping parts when vacuum cups cannot be used or when a standard gripper is impractical. Typically, robot gripper fingers are implemented at the edges of wide parts or cosmetic parts. Once in place, the robot gripper finger swings behind the part and locks into position to grip the part’s front and back faces.